Verification of Valve
In order to verify the Valve, a benchmark model is designed in which the Valve has a prescribed proximal and distal pressure and area.
Code Verification of the State Variable \(q\)
The Valve module solves the differential equation:
This benchmark setup places the Valve module in a setup with prescribed constant proximal and distal pressures. The proximal pressure is a stepfunction, for which the pressure is \(p=2000Pa\) for \(0.1<t<0.4\) and \(p=0Pa\) elswhere. The distal pressure is constant at \(p=1000Pa\). This results in a \(\Delta p = \pm 1000Pa\).
This benchmark problem has 3 phases. Phase 1 has a negative pressure drop with a positive decreasing flow. Phase 2 has a negative pressure drop with a negative stabalizing flow. Phase 3 has a positive pressure drop with a positive increasing to stabalizing flow. After phase 3, phase 1 is repeated.
Two different valve states occur in these phases, namely open and closed valve. This results into 3 different analytical solutions for each of the phases.
To analytically solve the equation, we rewrite the equation into
In this equation, \(L_{total}\) is given by
in which \(A_{eff}=A_{open}\) if \(\Delta p<0\) and \(A_{eff}=A_{leak}\) if \(\Delta p>=0\). Furthermore, \(\alpha\) is given by
As a result of the \(|q|\), there are two analytical solutions. One for positive flow and one for negative flow. Additionally, the constant \(\alpha\) changes when
Phase 1: Positive pressuredrop with positive decreasing flow
with \(c_1\) such that \(q(0) = q_0\). Notably in this analytical solution is that if \(\Delta p\) is negative, \(\alpha\) is also negative. Consequently, must be \(A_{open} < A_{prox}\). The limit of these solution goes to \(q=-\infty\), however, it will go to phase 2 when the sign of \(q\) changes negative.
Phase 2: Positive pressuredrop with negative flow
with \(c_2\) such that \(q(t_2) = 0\). This phase is stable, with an asympote at \(q=-\sqrt{-\frac{\Delta p}{\alpha_{leak}}}\).
Phase 3: Negative pressuredrop
with \(c_3\) such that \(q(t_3) = 0\). This phase is stable, with an asympote at \(q=\sqrt{\frac{\Delta p}{\alpha_{open}}}\)
Verification
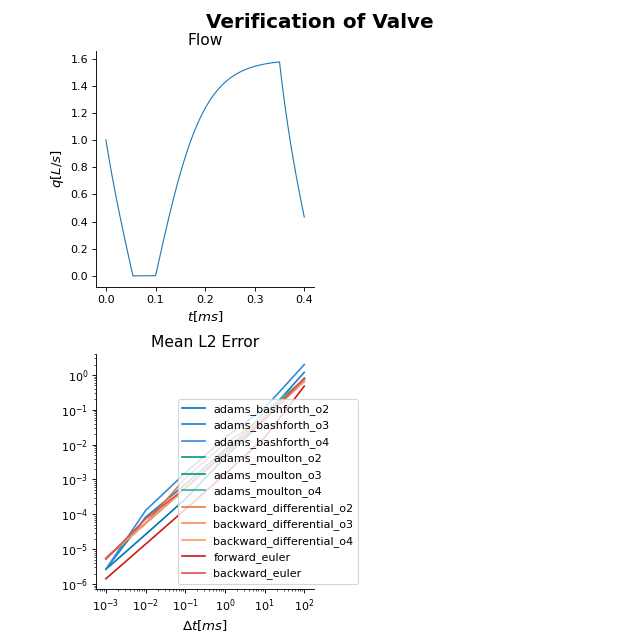
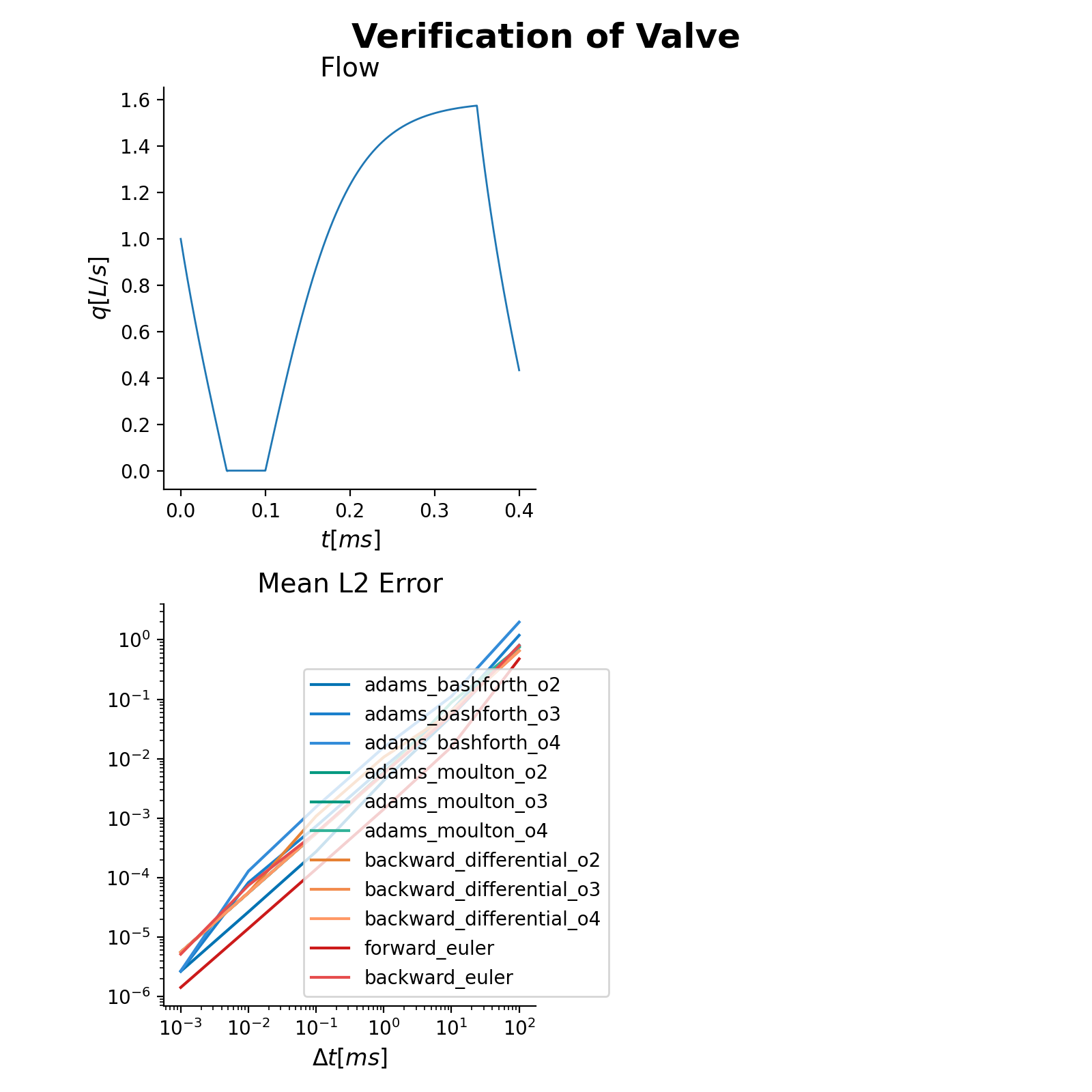
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
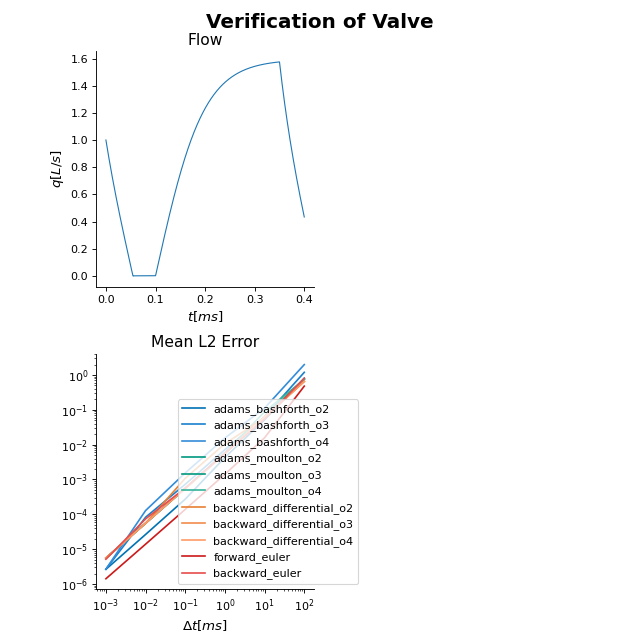
Fig. 22 Verification of the Valve module. Left: True solution of the flow pattern (solid) with the forward euler solution at \(\Delta t = 5e-3ms\). Note the overshoot when the sign of the flow turns negative, which is more pronound at larger timesteps. Right: Mean L2 error, defined as \(\sum_t \frac{\Delta t}{t_{cycle}} \frac{q_{true}(t) - q_{model}(t)}{\overline{q_{true}}}\), as a function of the timestep \(\Delta t\) for different numerical solvers. At \(\Delta t = 1ms\), all numerical solvers have mean L2 \(<1e-2\) except for the 4th and 5th order adams bashforth method.