Valve2022
Valve2022 valve connects two nodes. |
Documentation
Valve2022 valve connects two nodes.
Parameters
- adaptation_Aopen_fac: double
factor used
- AOpen: float
Opening area
- ALeak: float
Leaking valve area
- Len: float
Length of valve
- rhob: float
Blood density
- papillary_muscles: bool
If true, papilary muscle implementation is activated
- soft_closure: bool
If true, a soft closure is activated
Signals
- q: float
Flow through the valve
- qDot: float
Time derivative of the flow q
Module
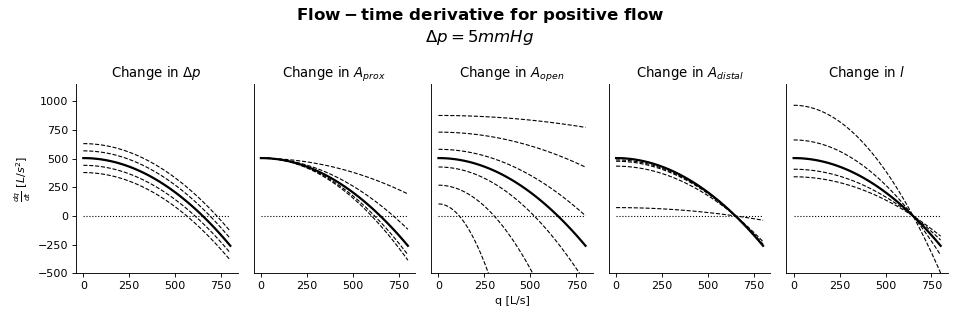
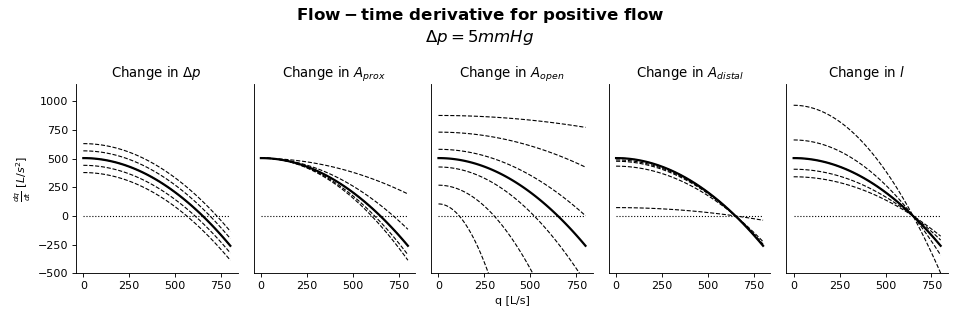
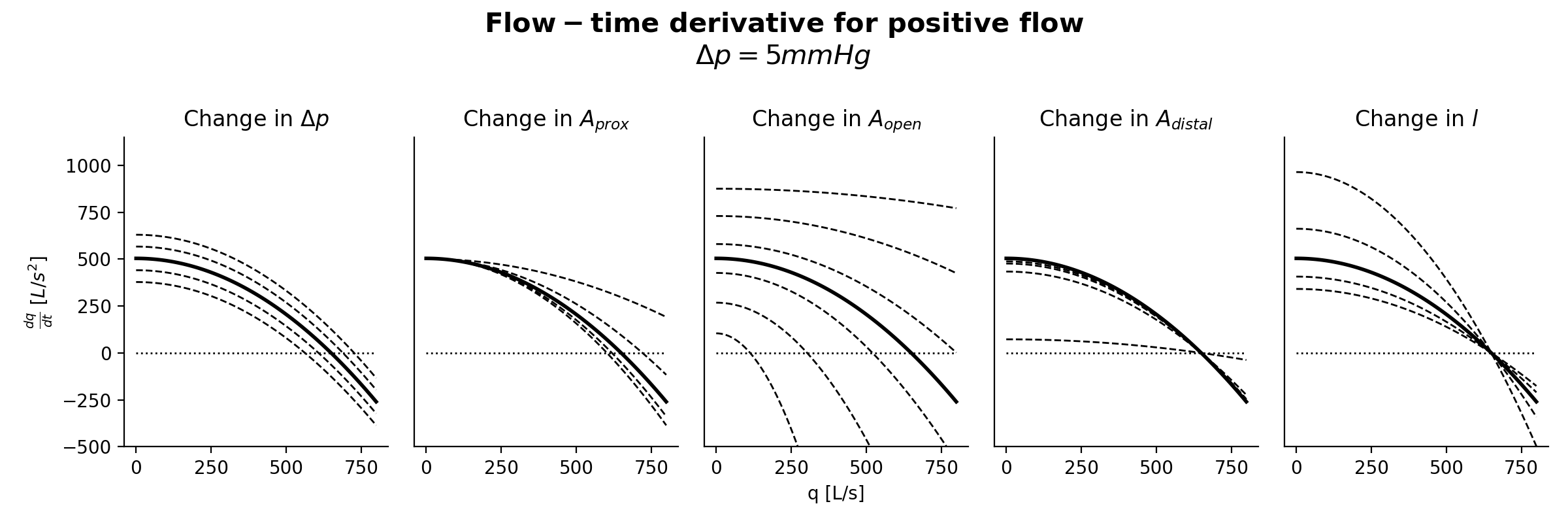
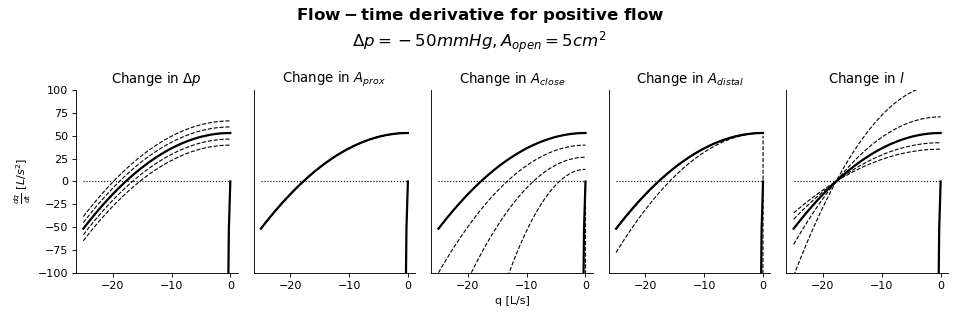
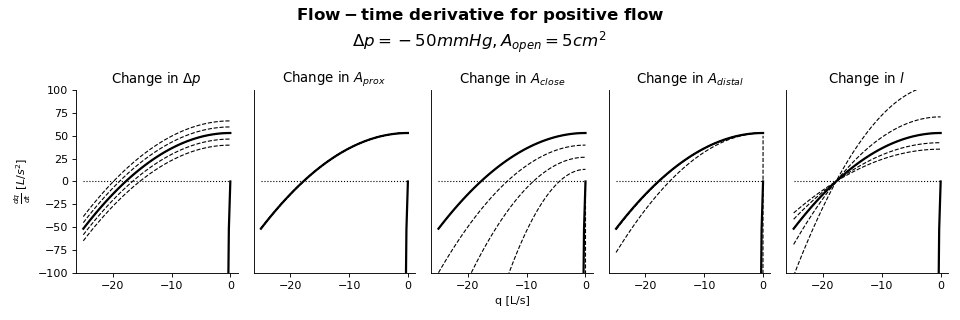
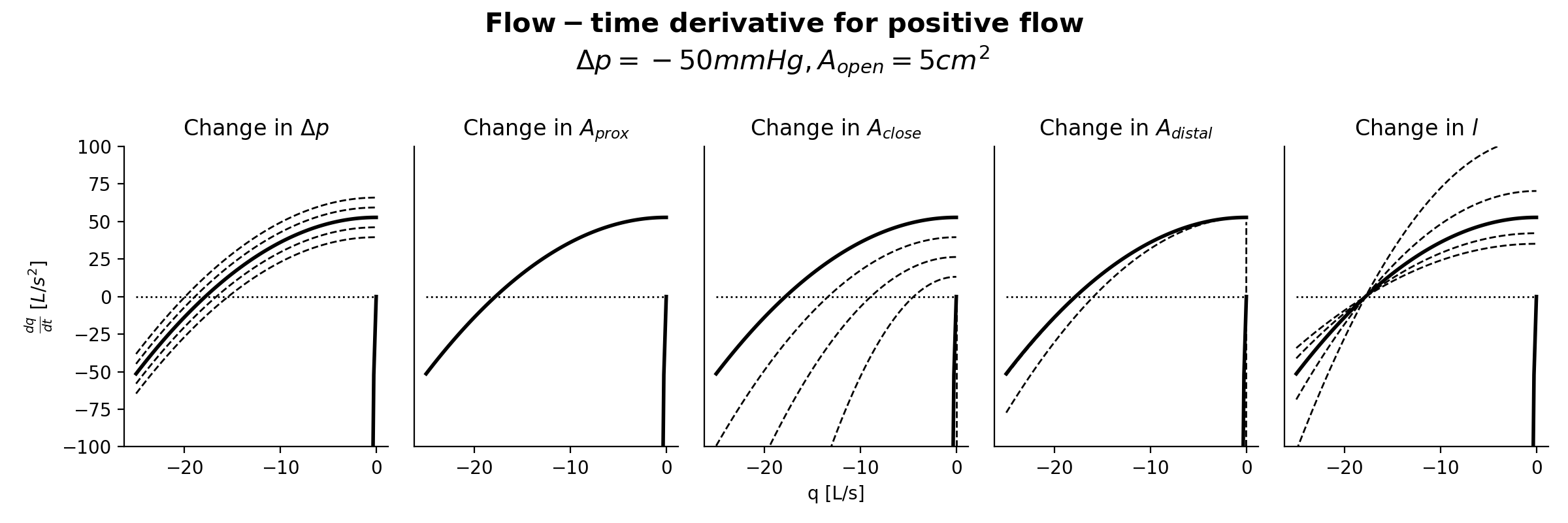
The Valve module describes flow \(q\) from a proximal to a distal node. The flow \(q\) is a state variable, and its derivative is given by
\[\frac{dq}{dt} = \frac{A_{eff}}{L_{eff}} \Bigg[\frac{q\cdot|q|}{2}
(\frac{1}{A_{prox}^2}-\frac{1}{A_{eff}^2})-\frac{\Delta p}{\rho}\Bigg]\]
Inertia term \(L_{eff}\) is given by
\[L_{eff} = 1.5 \cdot \rho \cdot (\frac{l}/{A_{eff}} + 0.5 \cdot (\frac{1}{\sqrt{A_{prox}}} + \frac{1}{\sqrt{A_{dist}}}))\]
The effective valve area \(A_{eff}\) is given by
\[\begin{split}A_{eff} = \begin{matrix}
\min(A_{open}, f_{A_{open}A_{ext}}\cdot A_{ext}) & \textup{if} \Delta p > 0 \\
A_{open} & \textup{if} \Delta p < 0 \textup{and} q > 0 \\
A_{leak} & \textup{if} \Delta p < 0 \textup{and} q < 0
\end{matrix}\end{split}\]
The derivative contains of a friction dominated component and inertia component. The first is depending on the pressure difference \(\Delta p\) and blood density \(\rho\), the latter on the flow \(q\) and valve area \(A\).
{kind=link}
{kind=link}
{kind=link}
{kind=link}