Valve2022
Valve2022 valve connects two nodes. |
Documentation
Valve2022 valve connects two nodes.
Parameters
- adaptation_Aopen_fac: double
factor used
- AOpen: float
Opening area
- ALeak: float
Leaking valve area
- Len: float
Length of valve
- rhob: float
Blood density
- papillary_muscles: bool
If true, papilary muscle implementation is activated
- soft_closure: bool
If true, a soft closure is activated
Signals
- q: float
Flow through the valve
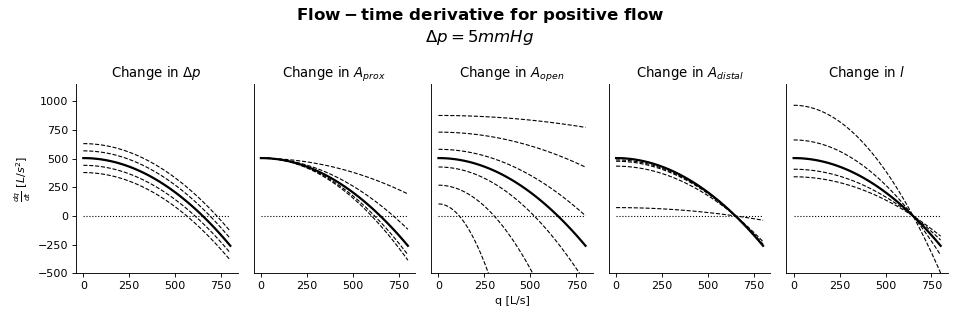
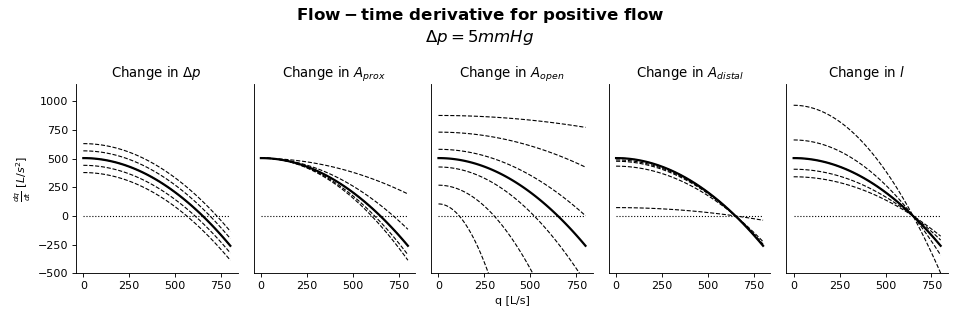
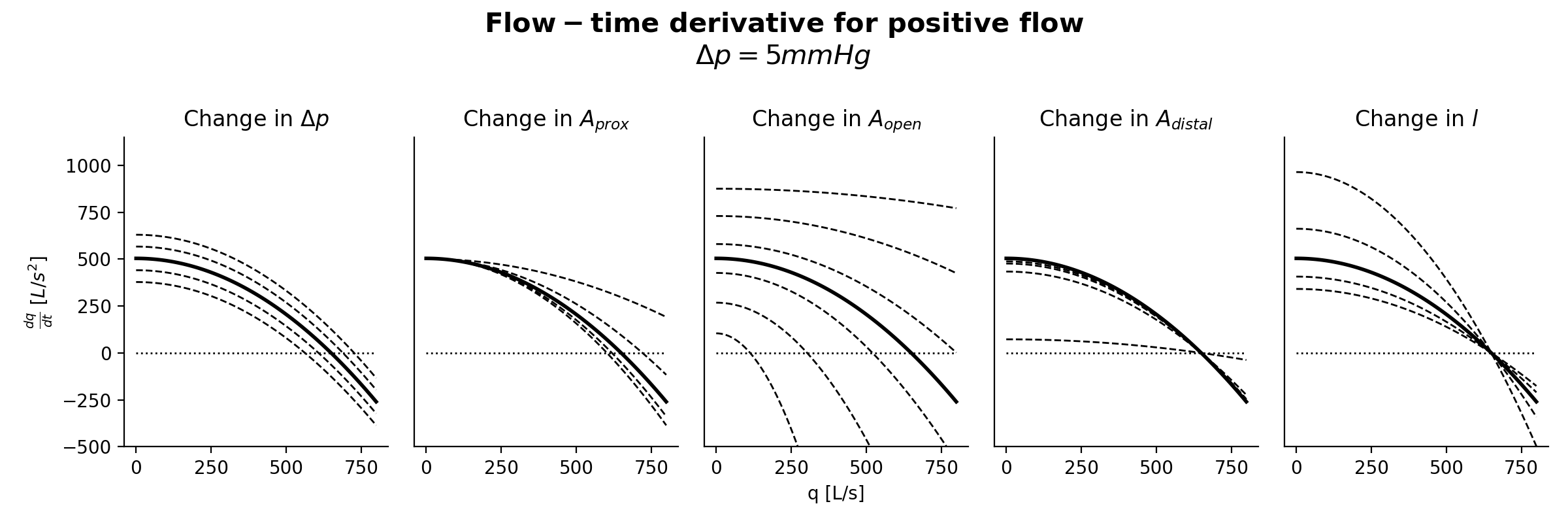
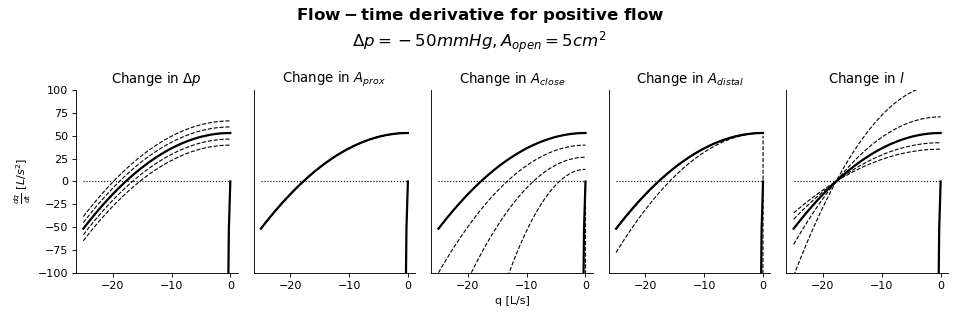
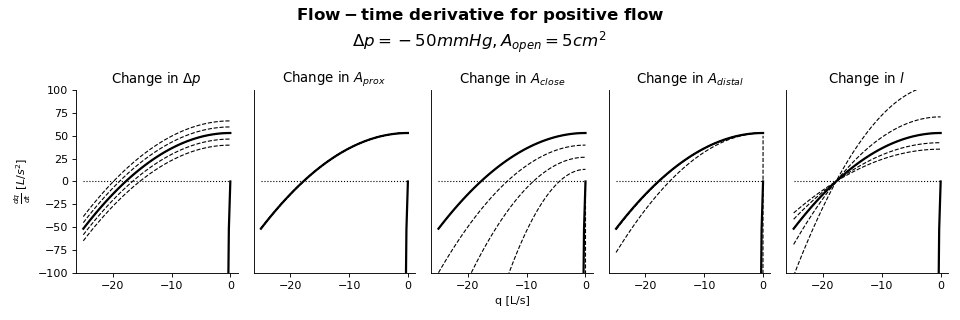
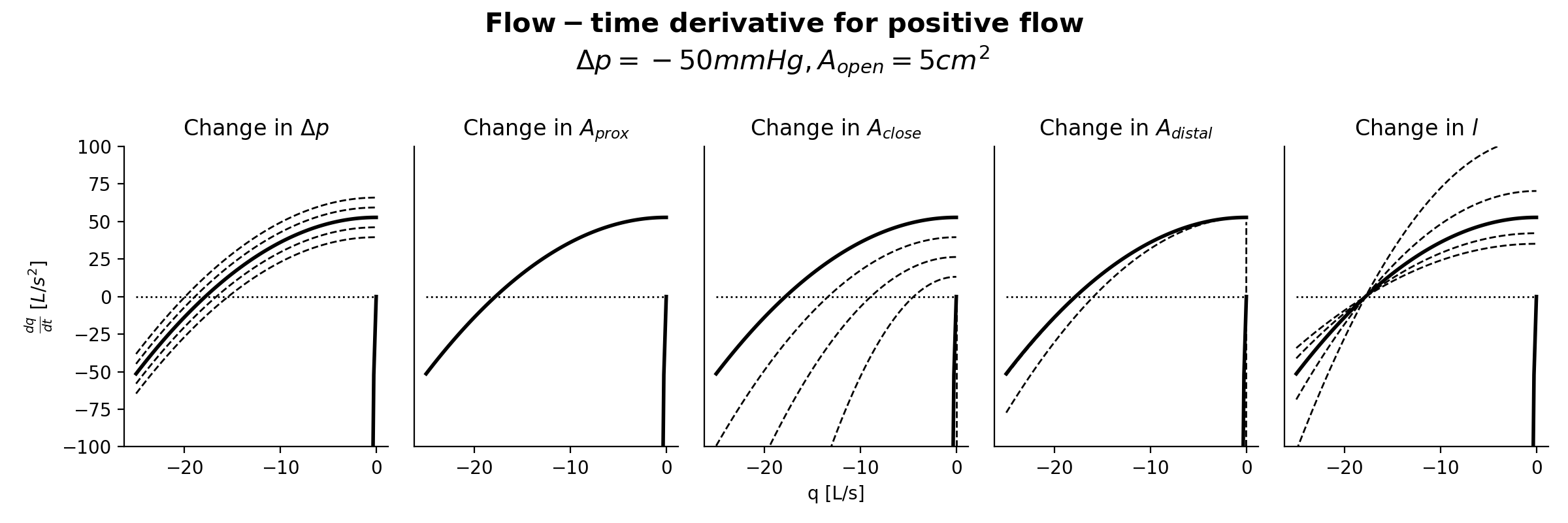
- qDot: float
Time derivative of the flow q
Module
The Valve module describes flow
Inertia term
The effective valve area
The derivative contains of a friction dominated component and inertia component. The first is depending on the pressure difference
{kind=link}
{kind=link}
{kind=link}
{kind=link}